NeuIPS 2018 > 原创博文 转载请注明https://yangsenius.github.io/blog/MetaAnchor/
一般目标检测方法中的Anchors的生成是来自于人类的先验知识:\(b_i\in \mathcal{B} \ which \ is \ predefined \ by \ human\)(\(\mathcal{B}\)属于 \({prior}\) \(i\)代表网格或锚点),即
- 通过固定锚点,或者划分网格,生成一定形状和尺寸的Anchor Bboxes 来作为候选检测区域,提取对应位置的图像特征,
先验往往代表设计人员在构思最初的朴素想法,来源于直觉,并把这种直觉融合在设计者的实现过程与代码中。 下面举两个例子。
在Faster Rcnn中
对输出的(W,H,d)维Conv map进行滑动遍历,每个滑窗输出一个特征向量WxH个d维的特征向量
根据根据感受野中心不变的原理,每个滑窗中心对应原图的anchor锚点或者说anchor bboxes的中心。
每个锚点映射到原图,实际上对应着来自3x3(3种特定的尺度x3个特定的形状)个的anchor boxes,我们认为这9个anchor bboxes经过特征提取得到的具有尺度不变性的特征向量,这些anchor bboxes意味着proposals。
然后作者使用先验规定:proposal与GTbbox iou大于某个阈值(0.7)认为是正样本,小于某个阈值(0.3)为负样本,其余的不参与训练!即给这些proposals做标签!
然后把这些正负样本送入RPN进行训练。
loss由regression和classification两个loss构成,即预测proposal的中心位置和宽高,以及proposal属于前景or背景
注意:这里的regression loss包含三个坐标:预测bbox、anchor bboxes、GT——bboxes,loss函数的目标是,缩小 [预测bbox与anchor bboxes相对偏移] 和[gt_bbox与anchor bboxes相对偏移]之间的差距!
经过RPN筛选后的Proposal的特征图的尺寸大小是不一致的,经过ROIPOOling得到特征维度一致的特征,使用与RPN共享卷积的Fast Rcnn进行进一步的分类和回归。
在yolo中
对任意输入尺寸的图像划分为\(s*s\)个网格
每个网格预测B个bbox的4个位置和1个置信度 - (confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息,object落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的groundtruth之间的IoU值)
每个网格同时预测C个类的类别信息(每个网格属于的某类别的条件概率)
即对于一个输入图像,其输出的张量为 \(S*S*(B*5+C)\)
在这里,有必要说明,这里“Anchor先验”的含义,即:要把anchor的设计(位置、尺寸、类比)蕴含在anchor function的设计中,而不能成为一个独立的模块
作者总结了一个较为一般的形式:
\[\mathcal{F}_{b_i}(\mathbf{x};\theta_i)=\left(\mathcal{F}^{cls}_{b_i}(\mathbf{x};\theta^{cls}_i),\mathcal{F}^{reg}_{b_i}(\mathbf{x}; \theta^{reg}_i)\right)\]
判断: 1. 每个候选区域的与真实bbox(如果有)的相对位置 \(\mathcal{F}^{reg}_{b_i}(\mathord{\cdot})\) 2. 每个候选区域的类别置信概率 \(\mathcal{F}^{cls}_{b_i}(\mathord{\cdot})\)
本篇文章,作者使用的Anchor Function 是从先验的\(b_i\)动态生成的,通过如下函数:
\[\mathcal{F}_{b_i}=\mathcal{G}\left(b_i; w \right)(2)\]
\(\mathcal{G}(\mathord{\cdot})\) is called \({anchor \ function \ generator}\) which maps any bounding box prior \(b_i\) to the corresponding anchor function \(\mathcal{F}_{b_i}\); and \(w\) represents the parameters. Note that in MetaAnchor the prior set \(\mathcal{B}\) is not necessarily predefined; instead, it works as a manner -- during inference, users could specify any anchor boxes, generate the corresponding anchor functions and use the latter to predict object boxes.
上面是作者的原话,我觉得这个想法还是非常具有启发性的。我的理解是:
我们不是先盲目地生成大量的Anchor来判断是否抛弃,而是根据后面推理时的需要,在对应的位置生成特定的anchor boxes,然后生成anchor function来预测物体bbox,这样就避免了大量无关的候选框?这是我的理解,不知道对不对,接着读论文~
“default boxes” , “priors” or “grid cells” 经常作为一个默认的方法。很多任务需要你在设计achor的大小、尺寸、位置时需要小心谨慎,不同数据集之间的物体bbox分布也会影响anchor的选择,但是MetaAnchor的方法就不用考虑这个问题。
受到 Learning to learn、few shot learning 、transfer learning的启发:有时候,我们的权重预测不是通过模型本身来学习,而是通过另一个结构(模型)来取预测权重,比如(Learning to learn by gradient descent by gradient descent,hypernetworks等),作者还拿自己的方法和learning to segment everything 作了对比,作者的权重预测是为了生成anchor function。
仿佛,论文最关键的就是如何生成anchor function了,也就是这个函数了:
\[\mathcal{F}_{b_i}=\mathcal{G}\left(b_i; w \right)\]
下面详细讨论这个机制。
Anchor Function Generator
In MetaAnchor framework, \({anchor \ function}\) is dynamically generated from the customized box prior (or anchor box) \(b_i\) rather than fixed function associated with predefined anchor box. So, \({anchor \ function \ generator}\) \(\mathcal{G}(\mathord{\cdot})\) (see Equ.2), which maps \(b_i\) to the corresponding anchor function \(\mathcal{F}_{b_i}\), plays a key role in the framework.
作者强调了从\(b_i\)映射到anchor function \(\mathcal{F}_{b_i}\), 这种映射关系是因为\(b_i\)是带着一种随机性
In order to model \(\mathcal{G}(\mathord{\cdot})\) with neural work, inspired by HyperNetworks,Learning to segment everything, first we assume that for different \(b_i\) anchor functions \(\mathcal{F}_{b_i}\) share the same formulation \(\mathcal{F}(\mathord{\cdot})\) but have different parameters, which means:
\[\mathcal{F}_{b_i}(\mathbf{x}; \theta_i) = \mathcal{F}(\mathbf{x}; \theta_{b_i})\]
作者写这个公式,似乎想给出 无论怎样选择\(b_i\) 的anchor function的一般形式。为什么这么做呢?下标的变换有什么意义吗?
我根据后面的内容,猜测:一般anchor function在设计时是要考虑 anchor\(b_i\)的预定义方式,也就是我们要根据不同的anchor先验,具体设计出相对应的anchor function。如果我们anchor function的设计能够独立于anchor\(b_i\)的预定义方式,让anchor\(b_i\)的设计变成一个函数的可学习的参数形式,那么就把问题转化为一般的超参数学习,或者Meta-learning 的方式。之前我研究Learning to learn by gradient descent by gradient descent,作者就是让人工干预设计的优化方式,变成了可以学习的参数,二者虽然面对的问题的不一样,但是都包含了一个共同的思想:
让人工设计的先验知识,转化成,可以通过另一个结构或模型学习的,参数形式:
\[人工先验知识 \rightarrow 可学习的参数形式\]
这个思想和我上一篇博客:learning to learn 所涉及的方法,在理念上不谋而合
接着看论文。
论文说道: > each anchor function is distinguished only by its parameters \(\theta_{b_i}\), anchor function generator could be formulated to predict \(\theta_{b_i}\) as follows:
\[\theta_{b_i} = \mathcal{G}(b_i; w) \\= \theta^* + \mathcal{R}(b_i; w)\]
就是说,每个anchor function 通过参数 \(\theta_{b_i}\) 来唯一确定(我的理解应该没错),其中\(\theta^*\)代表共享参数(独立于\({b_i}\),并且可以学习),残差项\(\mathcal{R}(b_i; w)\)依赖于 anchor bbox \({b_i}\)
然后\(\mathcal{R}(b_i; w)\)使用一个简单的两层全连接网络来表示:
\[\mathcal{R}(b_i, w) = \mathrm{W}_2 \sigma \left( \mathrm{W}_1 b_i \right)\]
作者还考虑把图像特征引入到参数 \(\theta_{b_i}\)的学习中:
\[\theta_{b_i} = \mathcal{G}(b_i; \mathbf{x}, w) \\ = \theta^* + \mathrm{W}_2 \sigma \left( \mathrm{W}_{11} b_i + \mathrm{W}_{12} r(\mathbf{x}) \right)\]
\(r(\mathord{\cdot})\) 用来给 \(\mathbf{x}\)降维;
以上就是论文的理论思想了!
具体实施细节,结合RetinaNet代码,让我们来感受什么是“Prior”?什么是“Meta”
作者没有公布自己的源码是一件令人头疼的事情,这样就不知道,作者是如何把可学习的参数\(\theta_{b_i}\)如何融进anchor function,不过我后面会试图写一下。
作者说,这个方法更实用于one-stage的检测方法如 RetinaNet,yolo等,two-stage方法精度似乎受到第二阶段(anchor 不再发挥作用)的学习的影响更大。
作者主要说明了MetaAnchor在RetinaNet上的使用,先来看看什么是RetianNet,放上一段简介的代码
1 | class RetinaNet(nn.Module): |
注: 以上代码来自于kuangliu/pytorch-retinanet
从以上代码
_make_head(self, out_planes)
函数中可以得知:我们必须把anchor的数量考虑并体现在RetinaNet最后一层卷积核的通道数量上。 那么作为RetinaNET网络结构的这个卷积核部分,就包含了我先验的一种设计(Anchor类型数为9)。
这样做的弊端就是:假如我换了anchor的种类或数量,那么就要重新改变这个卷积核的设计,进而影响了网络的结构和参数学习,那么这就意味着我先前学习的对于9个Anchor的RetinaNet不再具有一般性,不再具备迁移学习的能力。
如果我想,换一种数据集bbox的分布,或者换一种先验anchor的选择方式,网络依旧能够使用的话,就必须将anchor的先验从原来的设计中剥离出来作为一个独立的结构,从而不影响整体结构的设计,并且可以根据需求自定义不同的anchor设计,这也就是这篇论文要解决的问题,并冠以“MetaAnchor”的称号,并使用了一个\(\mathcal{G}(b_i; w)\)的anchor function generator
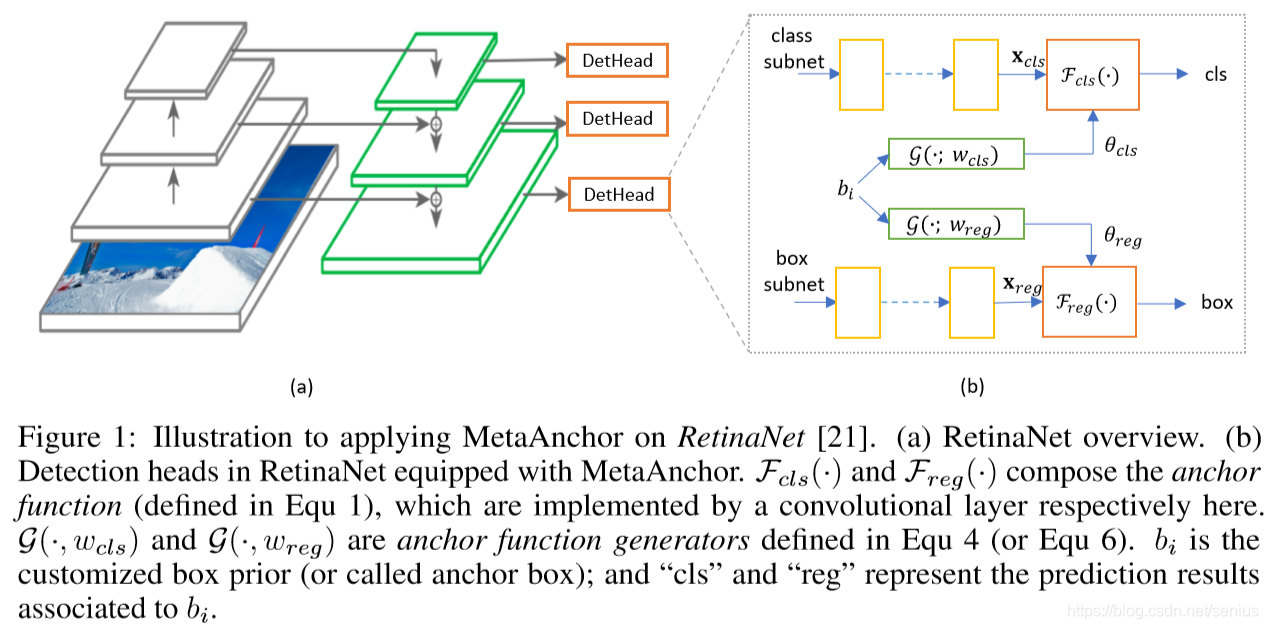
在RetianNet 的原设计中,每个detection head模块最后一层,对于预定义的3x3中anchor bboxes ,anchor function中:
- cls模块用3x3x80(类别)=720个通道卷积核,生成720维的预测向量
- reg模块有3x3x4=36个通道卷积核,生成36维的预测向量
而在使用MetaAnchor后,就降成了:
- cls模块有80(类别)=80个通道卷积核,生成80维的预测向量
- reg模块有4个通道卷积核,生成4维的预测向量
这就就需要重新设计anchor function。根据自己定制(customized)的anchor bbox\({b_i}\)首先,应该考虑如何编码\({b_i}\),它包含了位置、尺寸、类别信息,多亏了RetianNet的全卷积结构,位置坐标信息已经包含在Feature map 中,我们使用\(\mathcal{G}(\cdot)\)来预测类别,那么\({b_i}\)只需要包含尺寸信息:
\[b_i = \left(\log \frac{ah_i}{AH}, \log \frac{aw_i}{AW} \right)\]
在一个训练的mini-batch中,我们给定一个二维\(b_i\)的数值,分别经过两层的全连接网络\(\mathcal{G}(b_i; w_{cls})\)和\(\mathcal{G}(b_i; w_{reg})\)的映射,得到一个\(W_{cls}\)和\(W_{reg}\)维度的参数\(\theta_{cls,b_i}\)和\(\theta_{reg,b_i}\)
论文里面没有给出这个参数\(\theta_{cls,b_i}\)和\(\theta_{reg,b_i}\)如何写入到Loss function中,我根据作者思路猜测:
论文提到 \(\mathcal{G} \left(b_i, w\right)\) 是一个低秩的子空间
不过根据论文的权重预测的思想,这里的参数\(\theta_{cls,b_i}\)和\(\theta_{reg,b_i}\)应该在lossfunction中发挥权重的作用,在训练过程中,通过给定一个位置和尺度下的anchor bbox的输出和标签,乘以相应权重,来计算该anchor点对应的所有anchors总的loss:
1 | import torch |
以上代码仅代表个人对论文的局限理解
因为看不到论文的代码,目前我理解最模糊的就是这个θ参数如何与loss function相结合的地方了,还请网友多多交流,欢迎发表更多的见解~
以上基本就介绍了是论文最主要的想法:
- MetaAnchor对于anchor的设定和bbox的分布更加鲁棒
- MetaAnchor可以缩减不同数据集bbox分布的差异的影响,即更具迁移学习的能力!
论文的更多的实验细节,我会继续阅读并更新博客~
=========================================
上次博客中说道,我理解最模糊的就是这个θ参数如何与ancnhor 的 loss function相结合的地方了
我重新阅读了论文,作者提到了权重预测的主要受到HyperNetworks的启发,然后我找来这篇论文,刚读完摘要,就恍然大悟理解了MetaAnchor里预测权重的思想,即这个θ参数的内涵,\(\theta_{b_i}\) 即 \(\mathcal{F}_{csl}\left(\cdot\right)\) 和 \(\mathcal{F}_{reg}\left(\cdot\right)\) 的中的参数,在RetinaNet中代表了最后一层卷积核的参数!
原来我在这个点上理解困难的原因是头脑中少了“HyperNetworks”的先验!
看来很多情况下,我们理解的困难源于:少了某些“先验知识”
HyperNetwork (ICLR2017)
HyperNetwork是什么呢,简言之:
用一个网络(A-HyperNetwork)生成另外另一个网络(B-主体网络)的权重
听起来很神奇,因为我们一般对于网络B的学习,通常经过梯度下降法产生梯度来更新参数。而这个工作可以直接用另一个网络的输出来预测。这样做的好处就是,我们可以将巨大参数量的权重学习,转换为一个小网络的参数学习,并可以通过端到端梯度优化的方法学习!
这篇论文分析了LSTM和CNN使用HyperNetwork的方法和效果,结合我们主要论述的MetaAnchor,我来简要介绍一下Static HyperNetwork在CNN中的应用
通过一个两层全连接的小网络,用一个layer embedding来预测(表征)CNN的卷积核参数值
对于一个深度的卷积神经网络,其参数主要由卷积核构成
每个卷积核有 \(N_{in} \times N_{out}\) 个滤波器 每个滤波器有 \(f_{size} \times f_{size}\).
假设这些参数存在一个矩阵 \(K^j \in \mathbb{R}^{N_{in}f_{size} \times N_{out}f_{size}}\) for each layer \(j = 1,..,D\), 其中 \(D\) 是卷积网络的深度
对于每一层 \(j\), hypernetwork 接受一个 a layer embedding \(z^j \in \mathbb{R}^{N_{z}}\) 作为输入,并预测 \(K^j\), 可以写成:
\[ {K^j} = g( {z^j} ),\forall j = 1,..., D\]
\[{K} \in \mathbb{R}^{ N_{in}f_{size} \times N_{out}f_{size}}, {z} \in \mathbb{R}^{N_z}\]

公式中,所有可学习的参数 \(W_i\), \(B_i\), \(W_{out}\), \(B_{out}\) 对于所有 \(z^{j}\)共享
在推理时, 模型仅仅将学习到的 the layer embeddings \(z^j\) 来生成第 \(j\) 层的卷积核权重参数
这就将可学习的参数量改变了:
\[D \times N_{in} \times f_{size} \times N_{out}\times f_{size}\]
\[\rightarrow\]
\[N_{z}\times D + d\times (N_z + 1)\times N_i + f_{size}\times N_{out}\times f_{size}\times (d+1)\]
应用到MetaAnchor中:\(\theta_{b_i}\)即RetinaNet的最后一层卷积核的参数
即,我们用自定义anchor设计\({b_i}\)成二维向量,作为“layer embedding”,输入两层的网络,预测了RetinaNet的最后一层卷积核参数的残差,这样就降低了原RetinaNet的卷积核滤波器的数量,就像之前提到的。
~~2019年6月25日更~~ 最后,可能还需要再次提到关于\(\theta^*\) 和\(\mathcal{R}(b_i; w)\)这两项的理解:
公式提到: \[\theta_{b_i} = \mathcal{G}(b_i; w) \\= \theta^* + \mathcal{R}(b_i; w)\]
我们想要学习的是\(\theta_{b_i}\) ,它有两部分构成:\(\theta^*\) 和\(\mathcal{R}(b_i; w)\),当进行学习的时候,梯度流到\(\theta_{b_i}\) 节点,会产生\(\theta^*\) 和\(\mathcal{R}(b_i; w)\)的梯度:\(\nabla\theta^*\) 和\(\nabla\mathcal{R}(b_i; w)\), 而\(\nabla\theta^*\)可以直接用来更新\(\theta^*\) ,但\(\nabla\mathcal{R}(b_i; w)\)进一步通过HyperNetwork网络流到其参数\(\nabla w\)上,然后更新HyperNetwork的参数\(w\)。以上是进一步的分析了,如果有问题欢迎提出~